ANRPFD Radioamateurs Actualités quotidienne Ecouteurs-SWL & Auditeurs Radiodiffusion












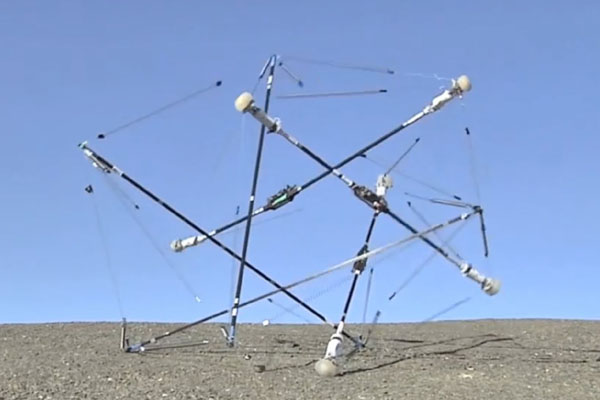 Faire atterrir un véhicule sur une autre planète nécessite une chorégraphie virtuose, avec force parachutes et rétrofusées. Une fois l’engin posé, ses roues doivent franchir divers obstacles sur des terrains éventuellement très escarpés. C’est là que le Super Ball Bot s’affranchit des règles de l’ingénierie classique. Cet habile assemblage de lignes géométriques simples est en mesure d’atterrir sans assistance, en absorbant sans dommage l’essentiel du choc de l’impact.
Faire atterrir un véhicule sur une autre planète nécessite une chorégraphie virtuose, avec force parachutes et rétrofusées. Une fois l’engin posé, ses roues doivent franchir divers obstacles sur des terrains éventuellement très escarpés. C’est là que le Super Ball Bot s’affranchit des règles de l’ingénierie classique. Cet habile assemblage de lignes géométriques simples est en mesure d’atterrir sans assistance, en absorbant sans dommage l’essentiel du choc de l’impact.
Sa conception s’appuie sur la tenségrité, mot-valise de tension et intégrité. Les structures de tenségrité se composent d’éléments rigides (comme des tiges cylindriques creuses) reliés par des matériaux souples (du câble élastique par exemple). Cela permet au robot d’absorber les forces d’un impact et de les diffuser dans de multiples directions. Comme ils sont déformables, ces robots peuvent également interagir plus efficacement avec l’environnement, par exemple se dégager avec agilité de sable mou, un défi périlleux pour les véhicules à roues.
En raccourcissant et en allongeant les câbles qui relient ses composants rigides, le Super Ball Bot se déplace en roulant sur lui-même. La structure réagit de manière non linéaire : un petit changement de longueur d’une connexion peut se traduire par un mouvement assez grand. Ces mêmes câbles peuvent être utilisés pour mettre en retrait certaines parties du robot, de sorte que les instruments scientifiques placés au centre puissent être exposés et utilisés.
Le concept sera présenté par la NASA à l’IEEE International Conference on Robotics and Automation (du 26 au 30 mai 2015 à Seattle)….![]() sur Elektor News
sur Elektor News